➢ 基于圆形差分的月基EUV影像数据自动定标
中国探月工程嫦娥3号着陆器上携载着一部观测地球等离子体层的极紫外相机,由于着陆器平台姿态控制中存在的未知因素以及任务执行期间极紫外望远镜角度的控制问题,地球的中心位置在不同EUV(Extreme Ultraviolet)影像CCD的像素位置是不固定的。我们通过分析嫦娥3号EUV影像数据的特征,提出了一种圆形差分的方法自动定标了2013至2014年间获得的超过600幅月基EUV影像数据的地心坐标。
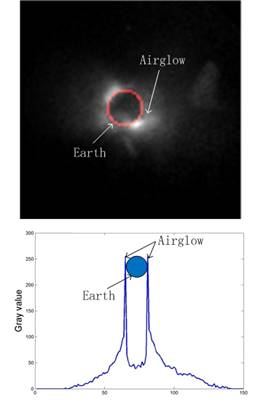
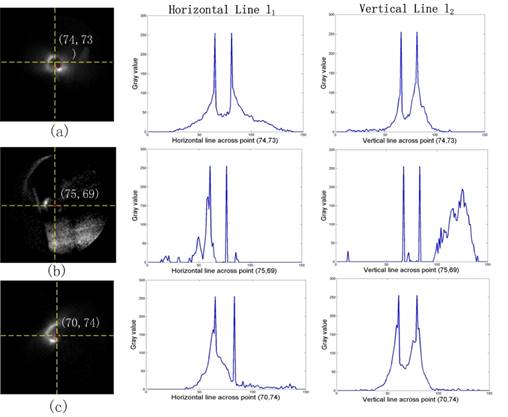
嫦娥3号月基的EUV影像和地球等离子体层地心定标结果 EUV影像X轴与Y轴的影像分布信息
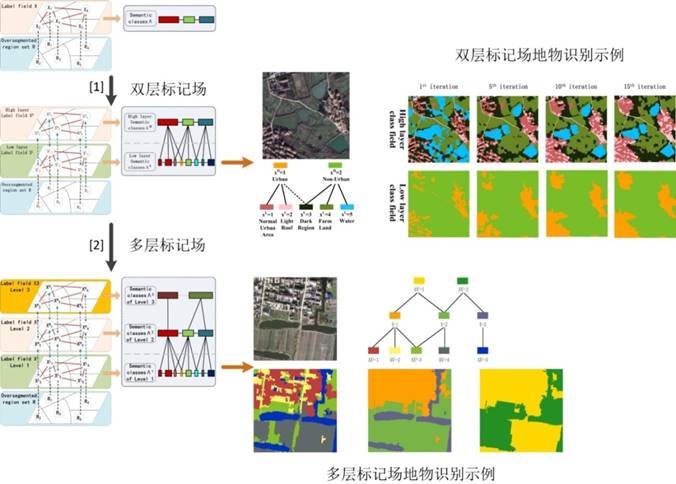
➢ 基于深层Markov随机场模型的地物遥感影像解疑
将对象级Markov随机场模型的标记场分别拓展至双层及多层,对地物遥感影像的多层语义信息进行识别解译。